About ERWHI
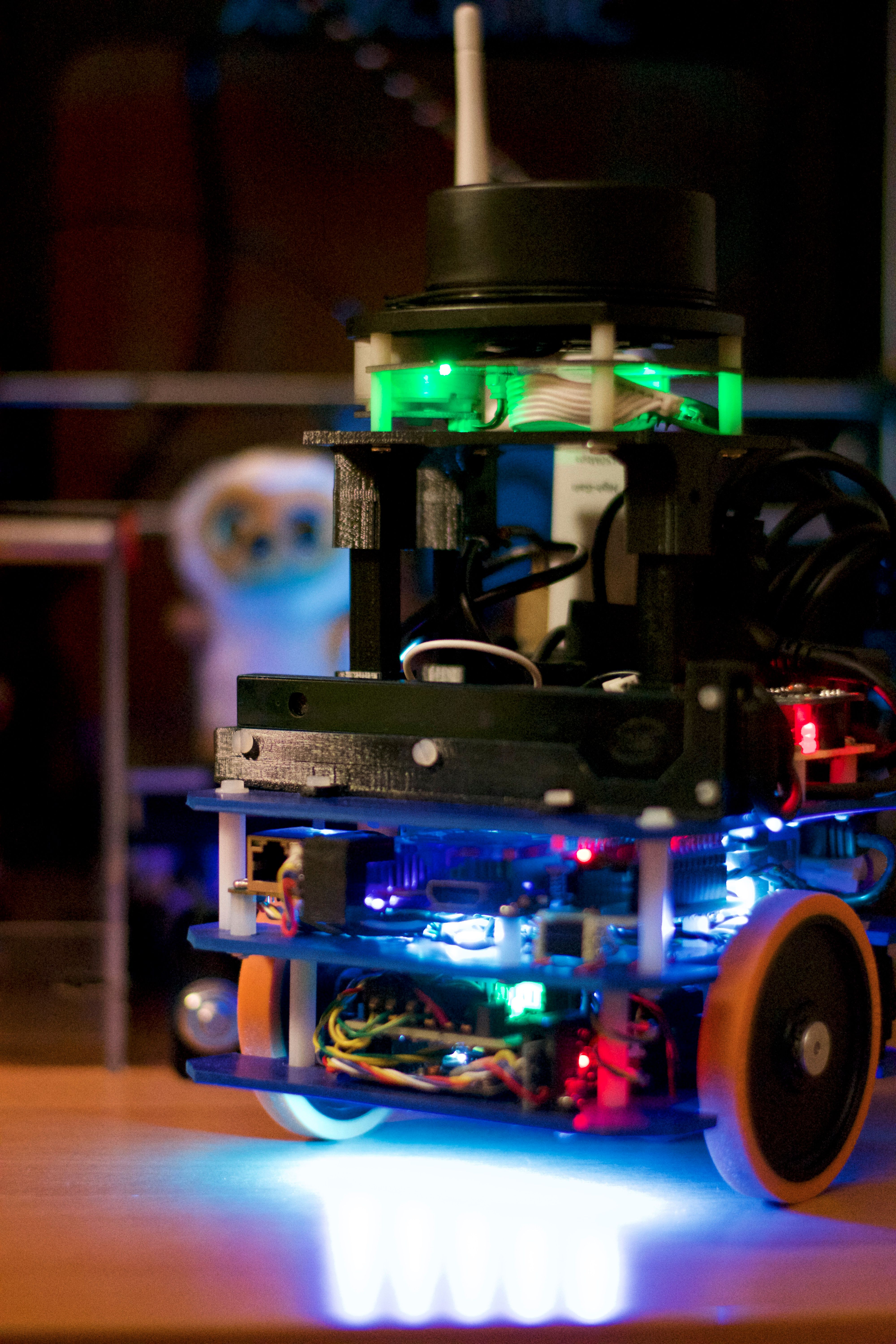
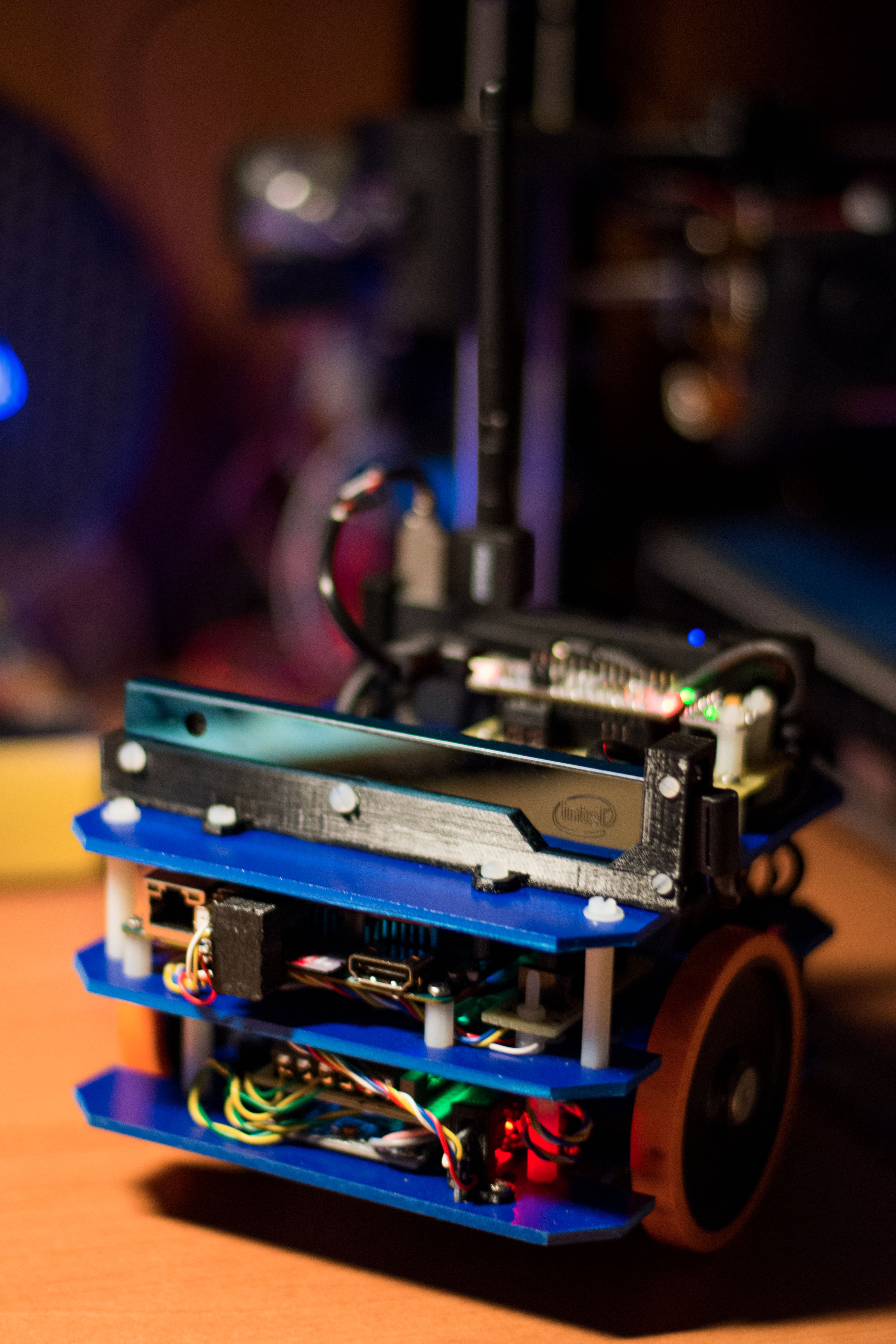
ERWHI is an open source small SLAM robot. It integrates some human interaction features and machine learning capabilities.
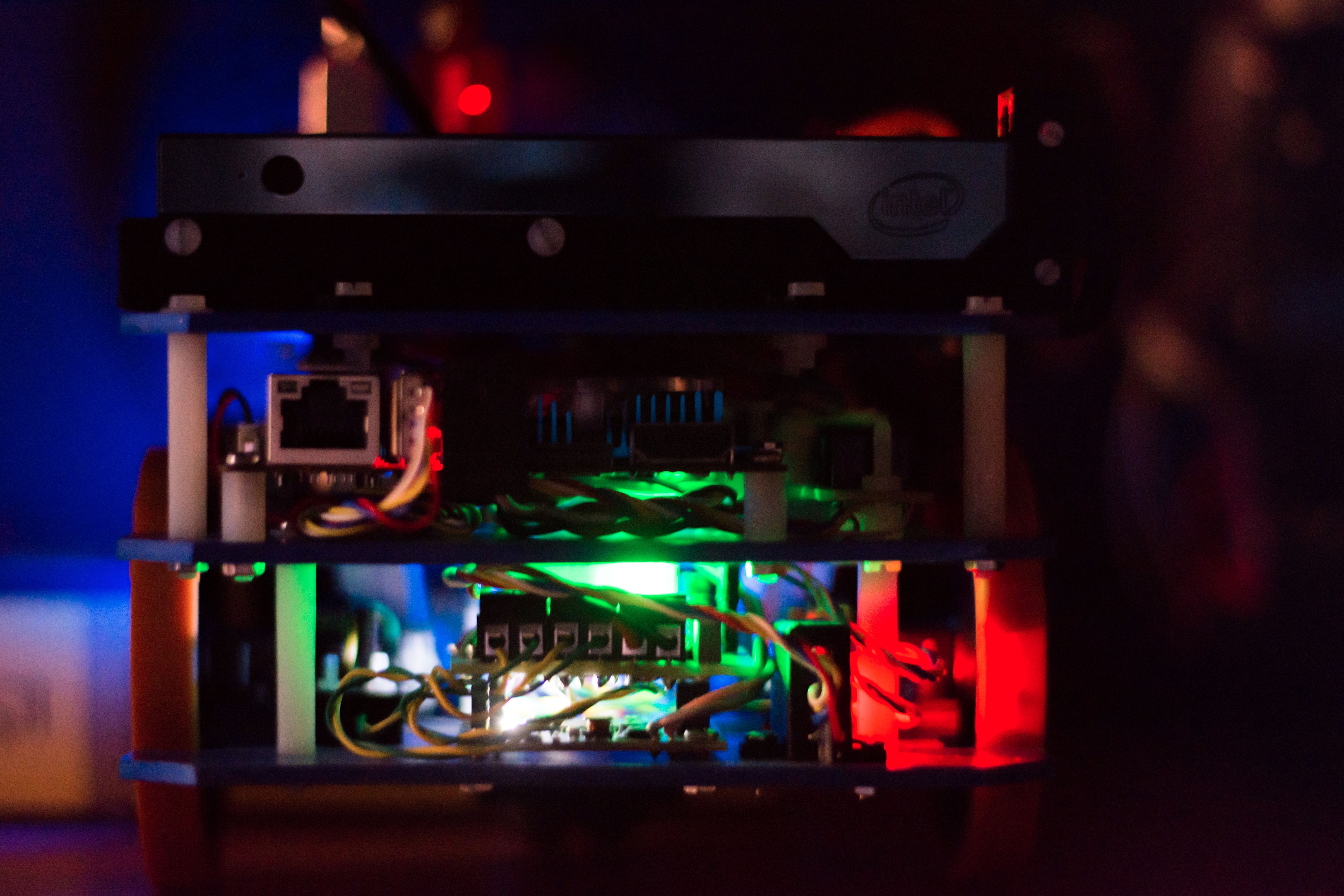
It works on ROS on an Odroid XU4 and Intel Realsense R200 as vision sensor.
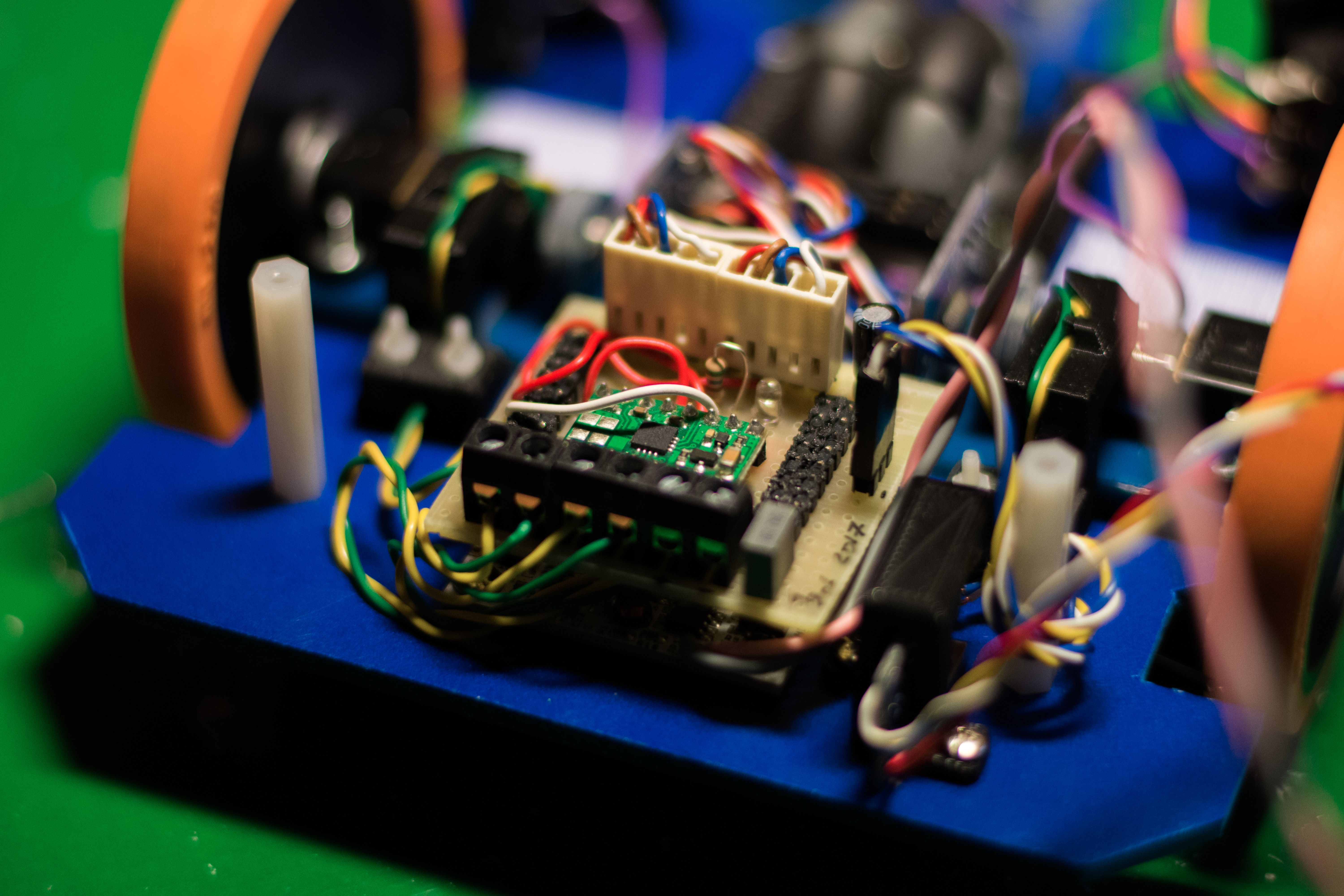
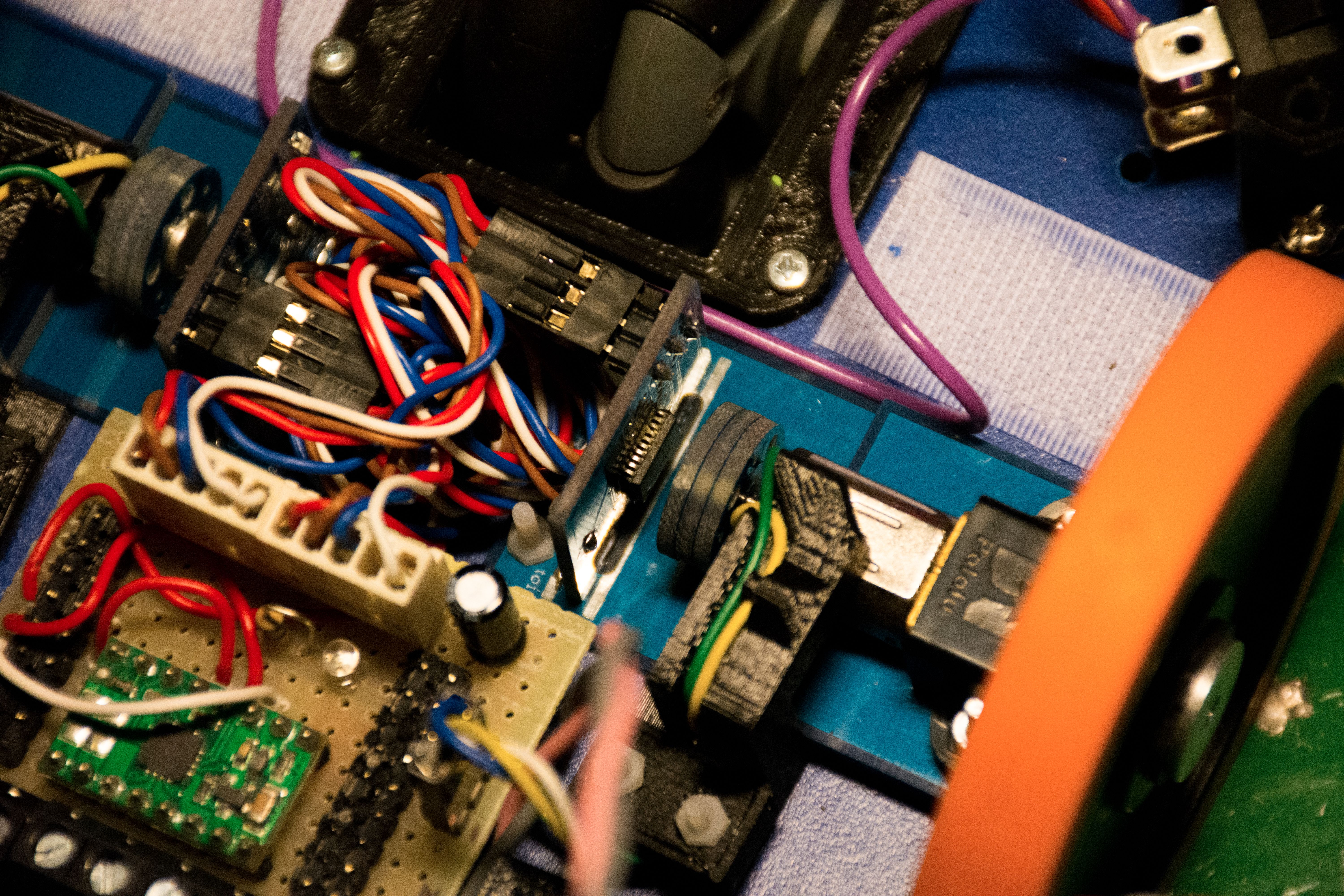
Motors are controlled by uNav and uuBridge (a custom uBridge).
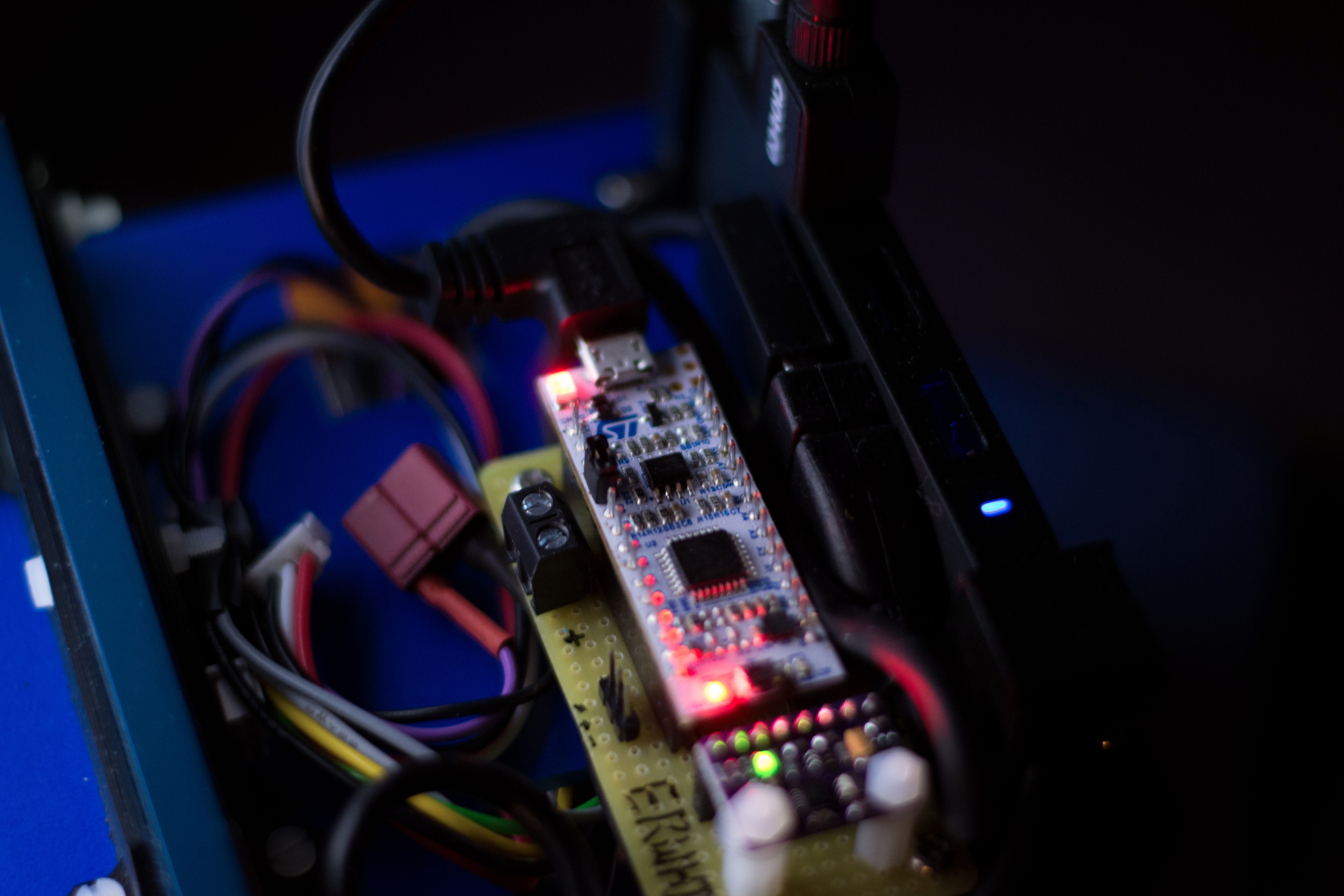
To achieve a perfect dynamics study, a special node was created using STM32-Nucleo and MPU9250.