Erwhi
First Erwhi designed.
Low performance hardware was used and only a webcam is used as vision sensor.
ERWHI is an open source small SLAM robot. It integrates some human interaction features and machine learning capabilities.
Actually there are 4 version.
The first one is a really simple robot.
Starting from version 2, often called simply ERWHI, robots are designed to be highly integrated with ROS.
Depth vision system is also included.
Robots are fully autonomous.
March 2017
First Erwhi designed.
Low performance hardware was used and only a webcam is used as vision sensor.
December 2017
First Erwhi with ROS.
2D Lidar based navigation stack.
Odroid XU4 is used as main board and unav motor controller.
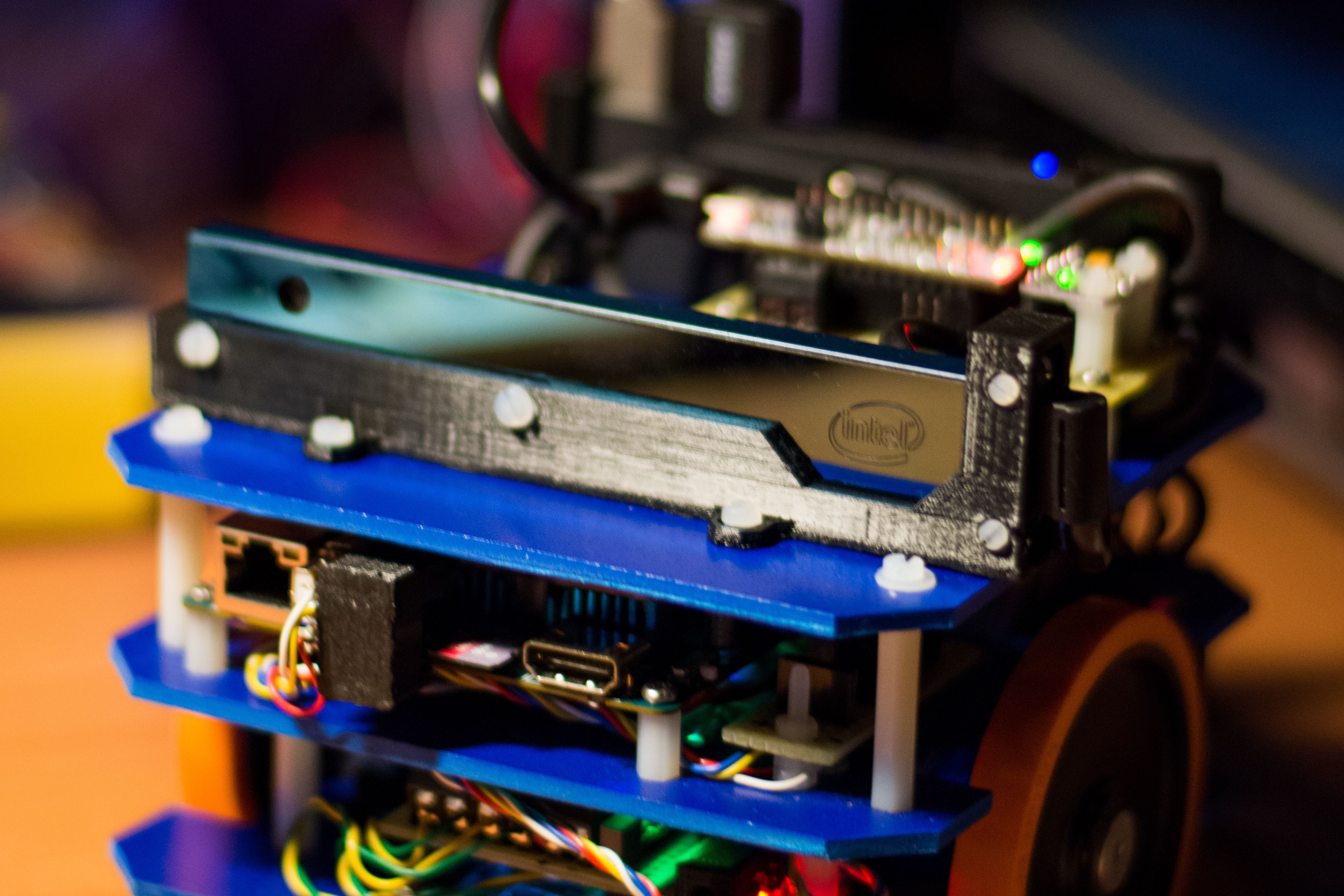
February 2018
This version was created to test UP Squared capabilities with Erwhi design.
It was shown ar Embedded World 2018 by AAEON.
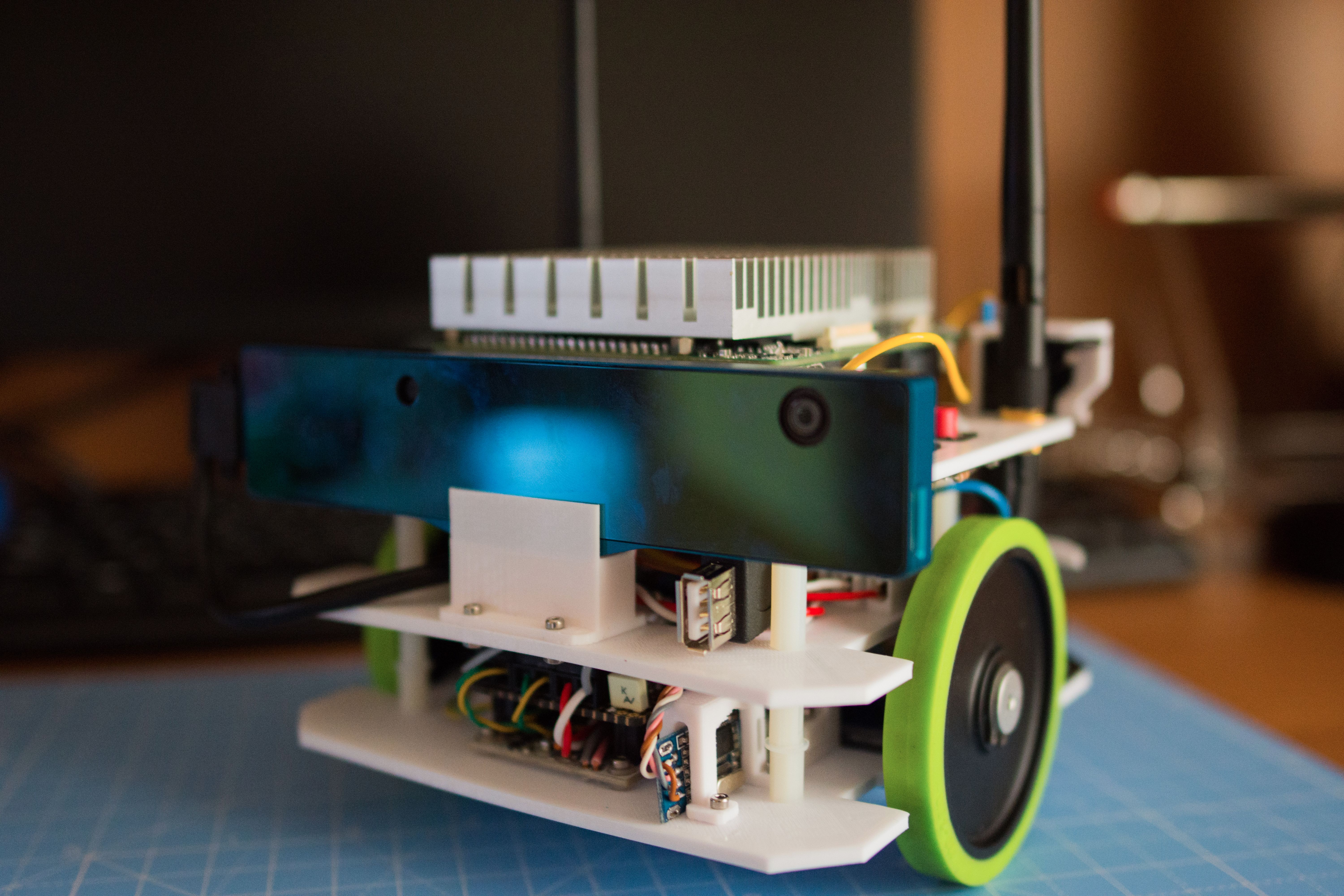
October 2018
The best Erwhi ever created. Fully open source and open hardware.
State-of-art navigation and vision ai achieved.
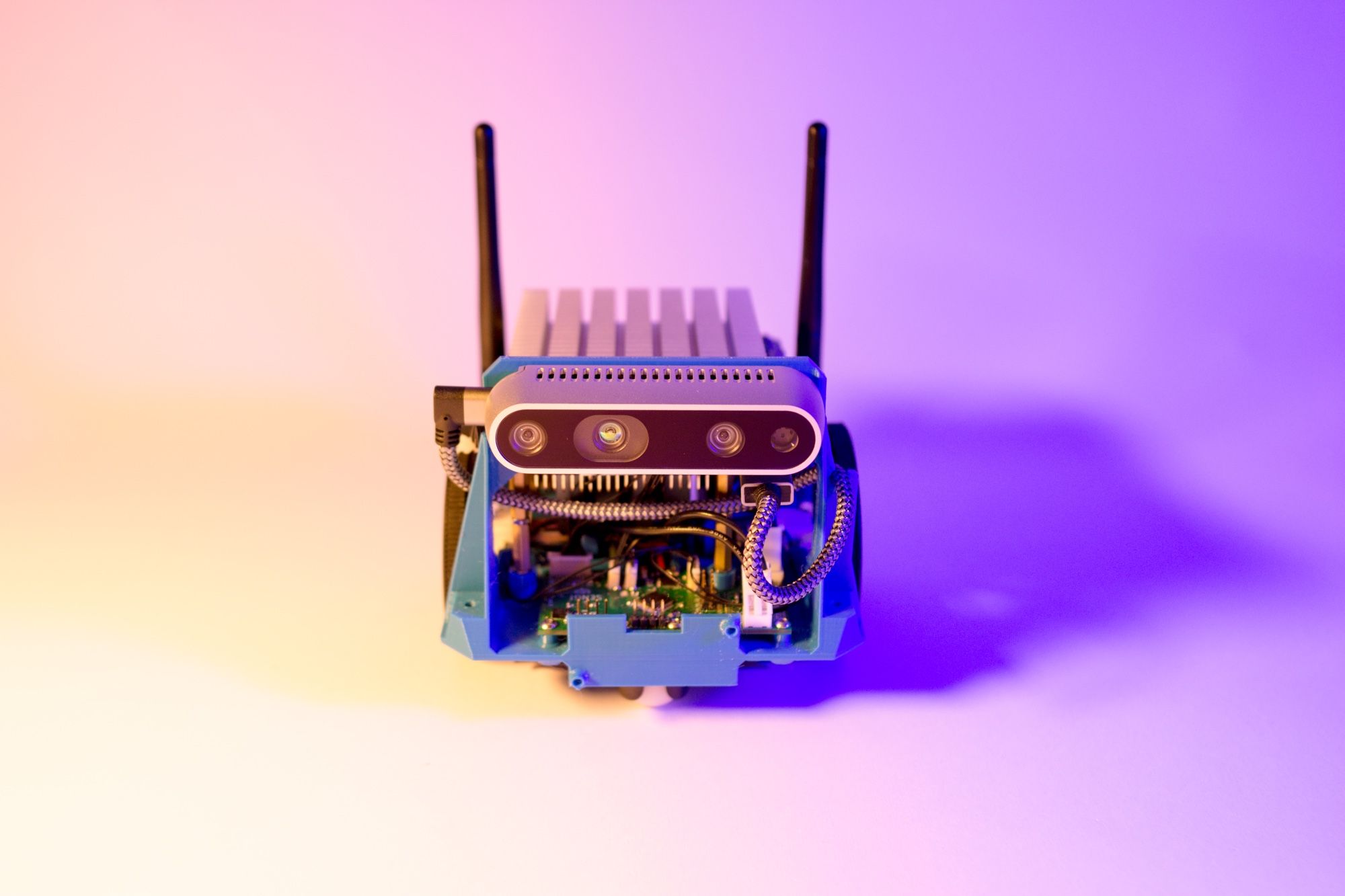
The main core is composed by UP Squared, Intel Realsense D435 and Ai Core X.
Mechanical parts can be 3d printed easily using a Prusa i3 mk3 or other common printers.
Motor control, BMS and power distribution works on Sengi board.
First prototype had been showed to IROS 2018.
Official realease on May 2019
- Arietta G25
- Microsoft HD3000
- STM32 Nucleo-F401RE
- Odroid XU4
- Intel Realsense R200
- uNav motor controller
- UP Squared Pentium
- Intel Realsense ZR300
- uNav motor controller
- UP Squared Atom
- Intel Realsense D435
- Ai Core X (Myriad X)
- Sengi carrier board
Made with Mobirise web creator