main features
Open source and open hardware
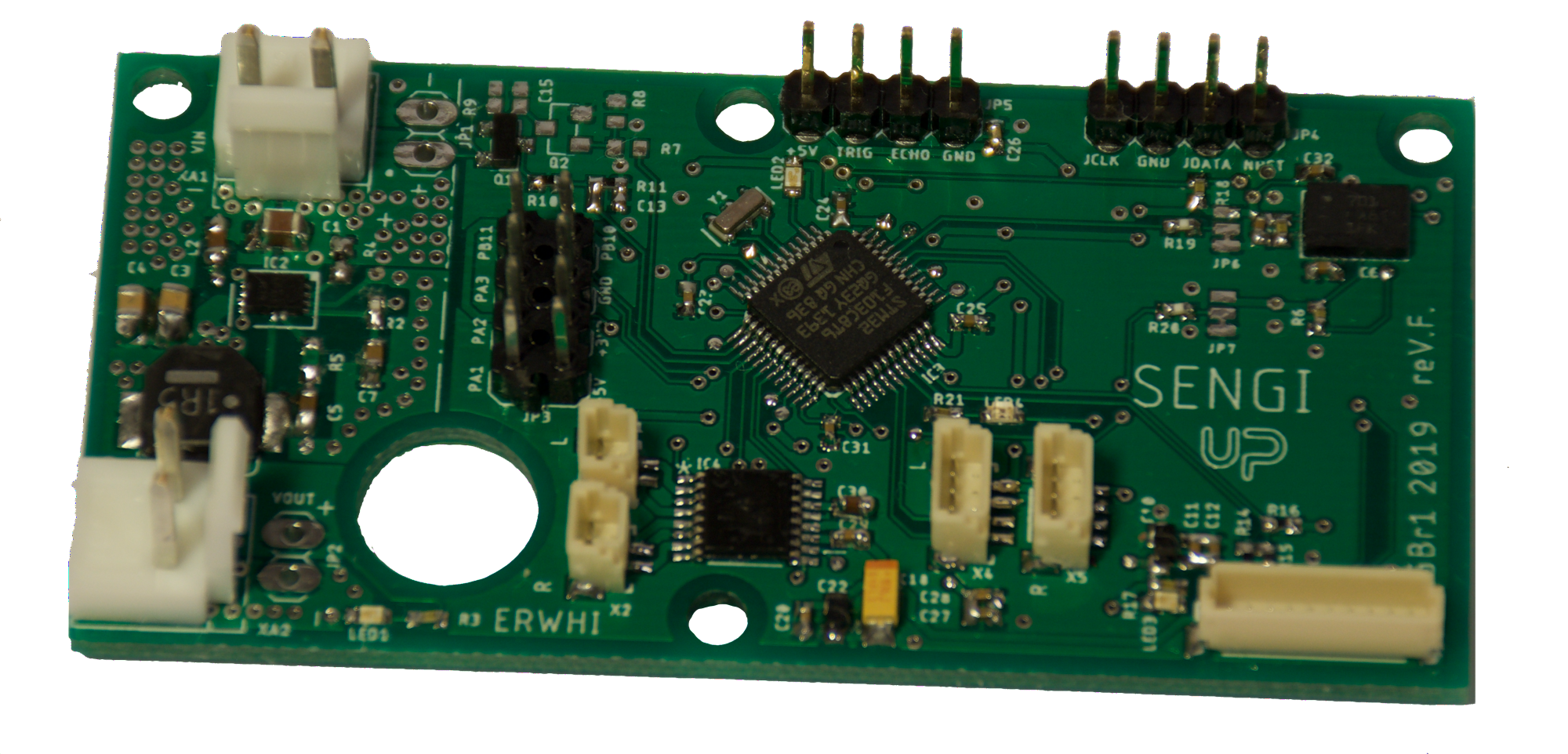
You can build your own Erwhi Hedgheog. It is completely open source under MIT license.
Robotics focused
You can easily achieve state-of-art navigation and object detection.
ROS based
Erwhi Hedgehog uses a standard ROS stack, so every ROS software is compatible.
Unlimited upgrades
Erwhi Hedgehog is easily upgradeable and customizable.