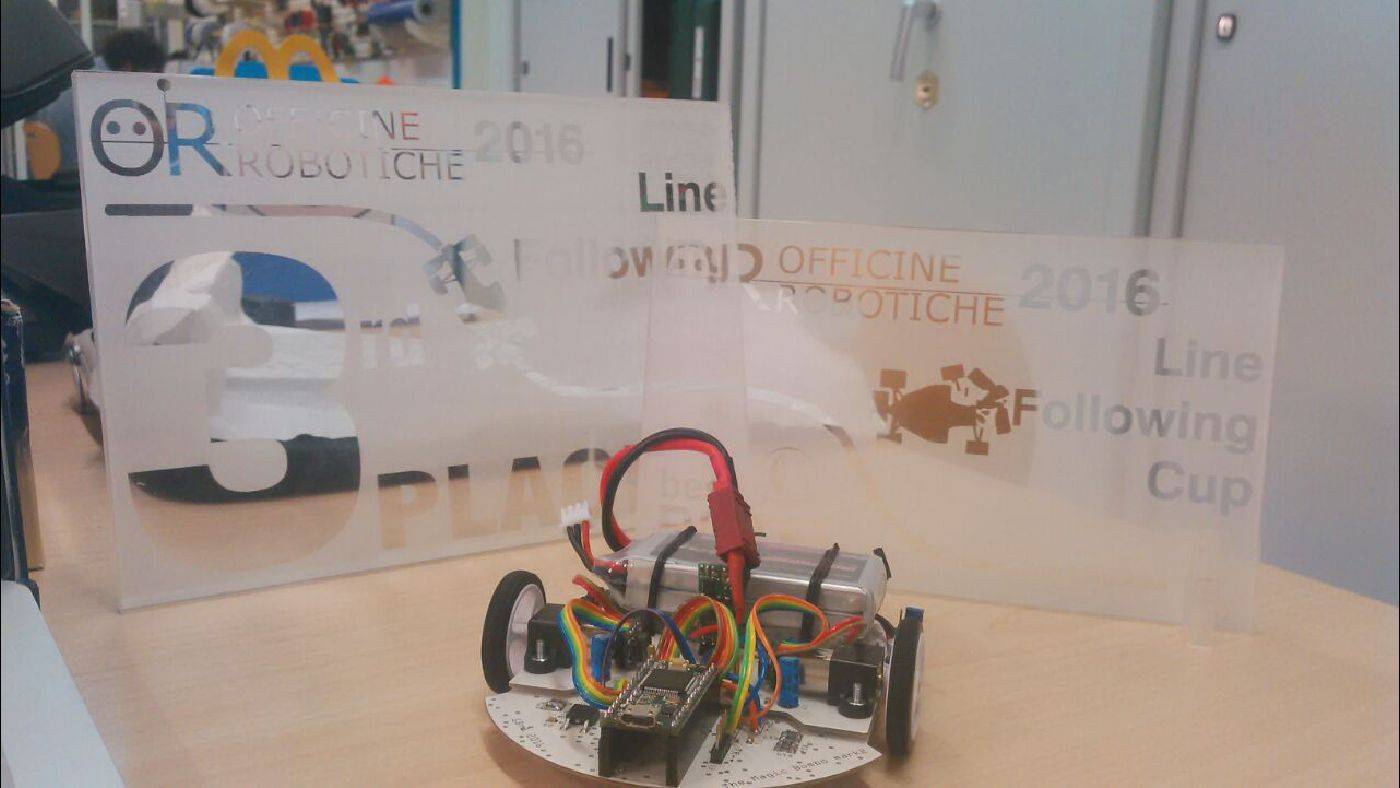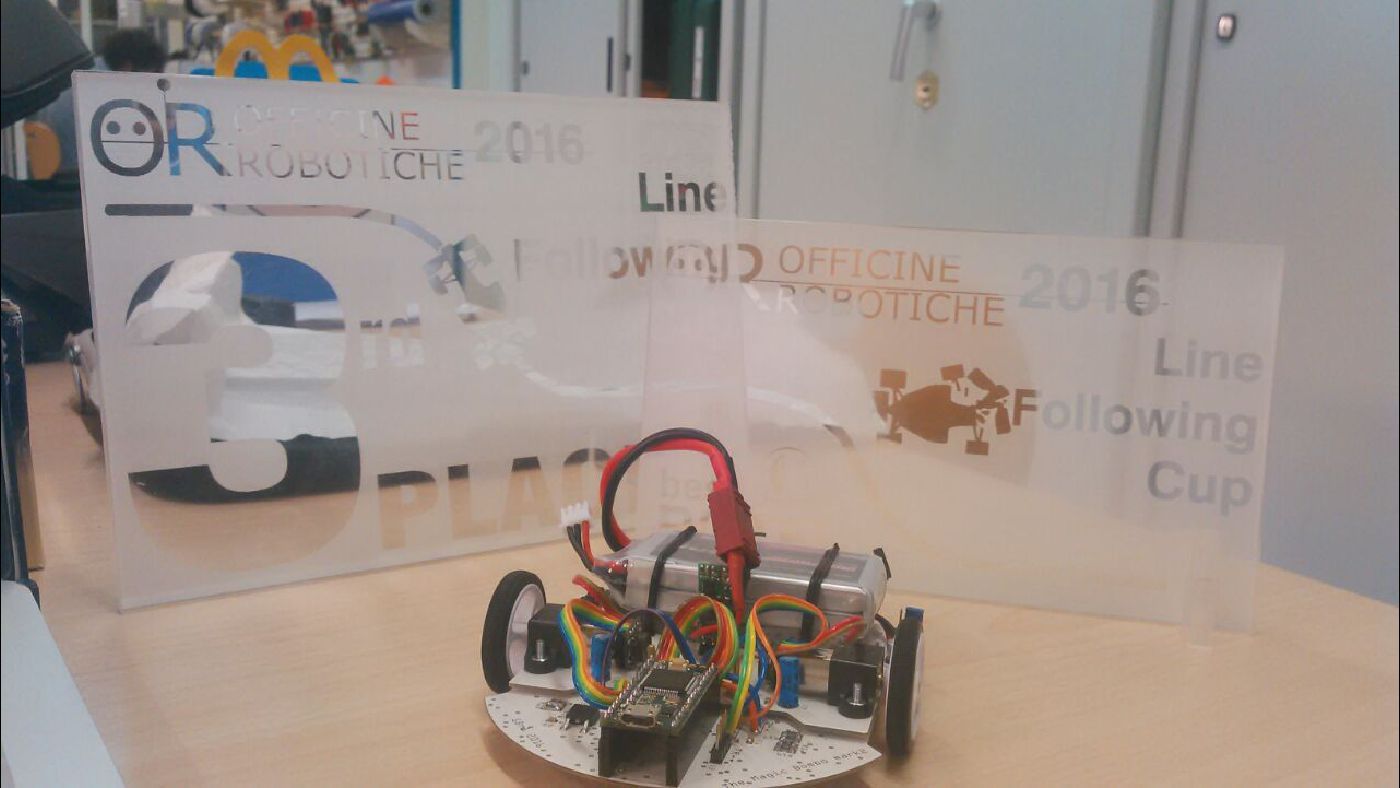
This robot placed 3rd at Officine Robotiche 2016 Line Follower competition.
Teensy 3.2 by PJRC
32bit ARM Cortex M4 by Freescale
Pololu - Sanyo
30:1 Micro Metal Gearmotor HPCB with extended shaft
Removable XBee, ZigBee serial protocol
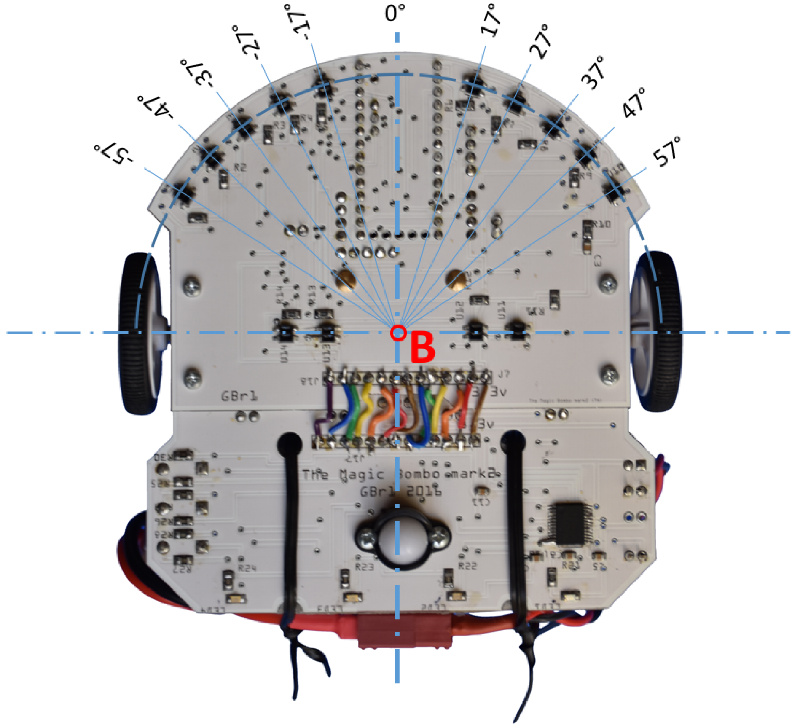
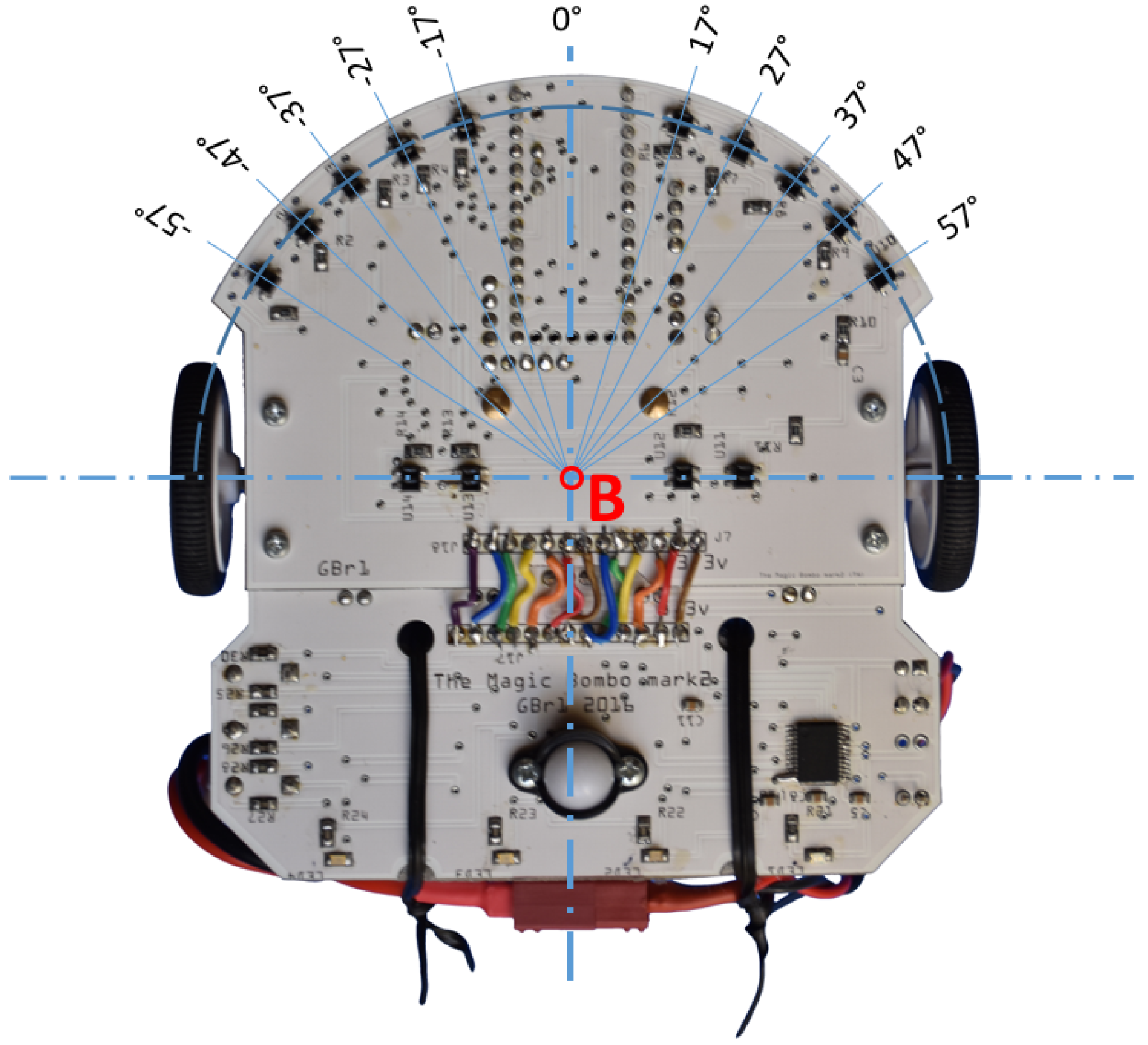
14 QRE1113GR
2 Pololu magnetic encoder
Competition setup:
Full power 2S 450mAh
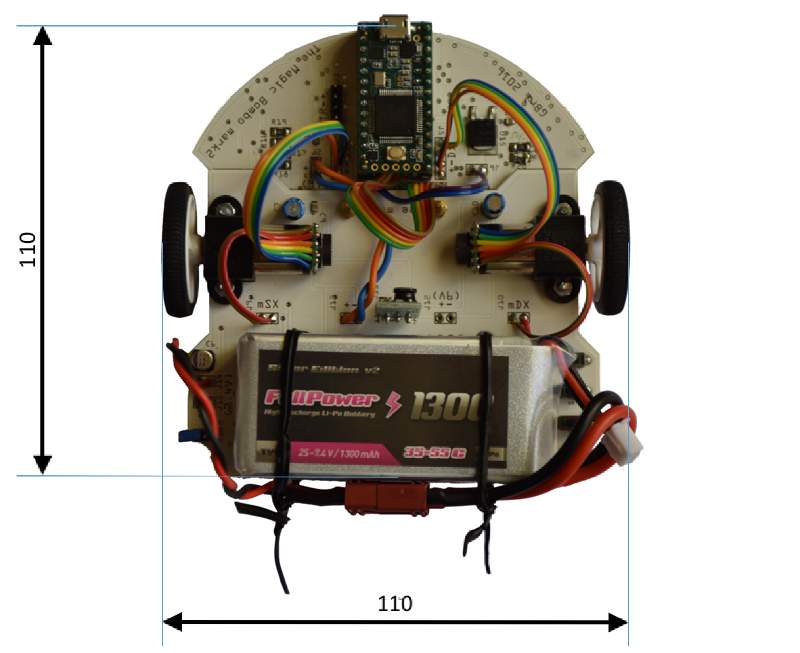
Benchmark setup:
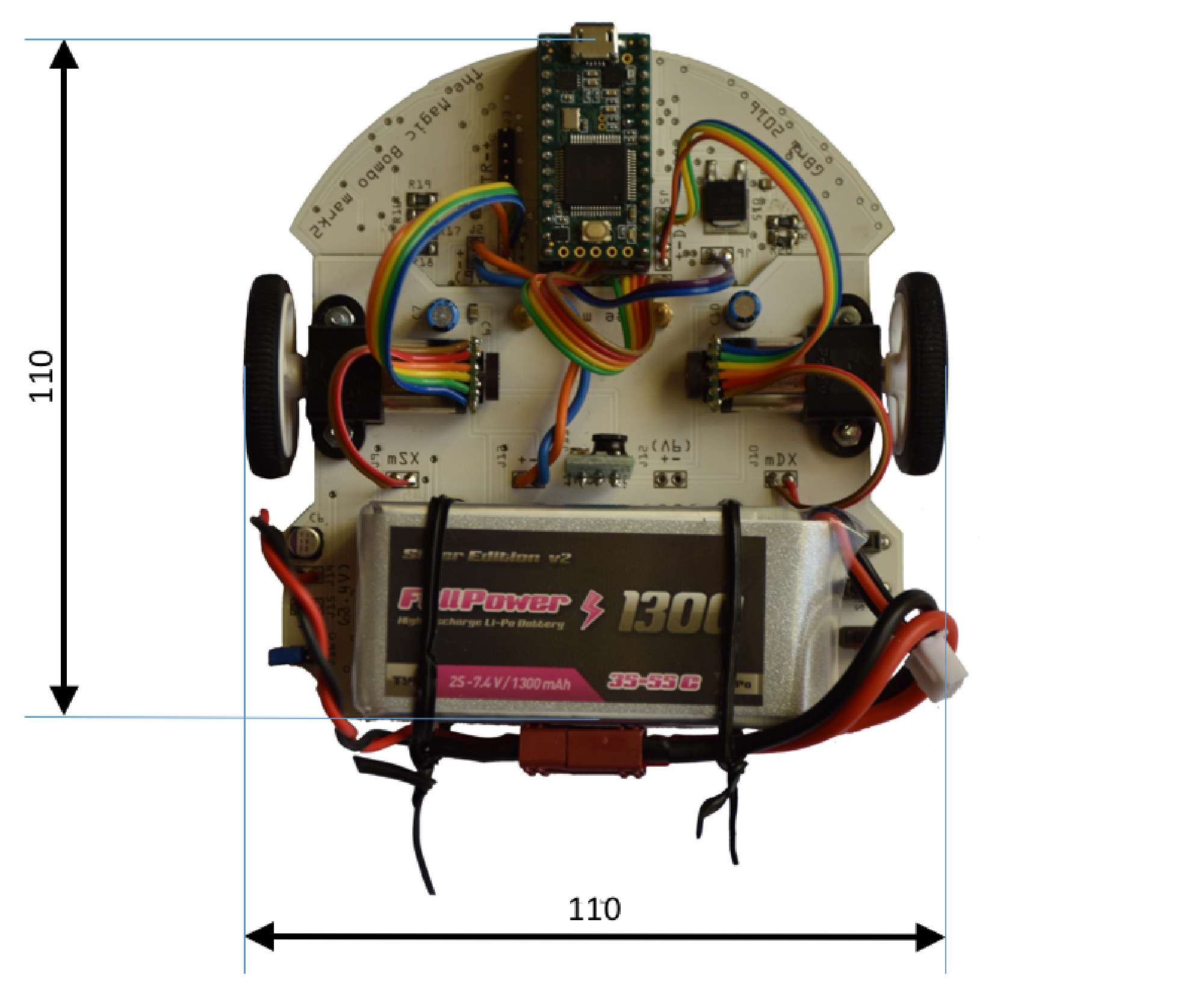
Full power 2S 1300mAh
Using odometry, I can rebuild race course at execution time.
It can be really useful to estimate controllers parameters.
I studied path planning and trajectory tracking.
My weapon was to optimize trajectories.
This page was designed with Mobirise